
👋 Hello there, I’m Spencer!
👨🏫 I’m a final-year PhD candidate at UW Aero & Astro working with my advisor, Prof. Mehran Mesbahi, at the RAIN Lab.
🧮 I love applying complex math solutions to practical engineering applications. My drive for pursuing a PhD in aerospace engineering is to be at the intersection of theory and application.
📚 I’m currently working towards my PhD thesis, where I am using Riemannian optimization techniques to design optimal policies. This bridges fields such as reinforcement learning, Riemannian geometry, and control theory.
🤖 I also have a lot of interest and experience in edge computing, distributed optimization, machine learning, and AI.
Highlights
🥇 Best Student Paper
I was awarded Best Student Paper at the 2024 IEEE Conference on Decision and Control amongst hundreds of student authors. The CDC is the largest and most prestigious international controls conference. This is a huge honor.
My paper focuses on a fundamental control problem called the linear-quadratic Gaussian using techniques from the emerging controls field called Direct Policy Optimization (DPO). DPO combines techniques from reinforcement learning and the theoretical safety guarantees from control theory to solve various control problems. I employed a novel technique called Riemannian optimization, which theoretically ensured convergence with an exceptionally fast rate. This new approach was an entire order of magnitude faster than the conventional policy gradient method.

🚀 SpaceX Internship
In 2022, I did an internship at SpaceX. I was a flight software engineer intern at Starlink and I worked on measuring the network robustness and performance of the Starlink constellation.
🤖 Open Source Contribution
I have experience contributing to ManOpt, an open-source Riemannian optimization library for Python, MATLAB, and Julia.
I am also my lab’s GitHub Organization Maintainer. I make sure our lab’s GitHub repos are cleanly written, and resolve any git issues with my labmates. Check out our lab GitHub org to see all of the awesome projects we’re working on.
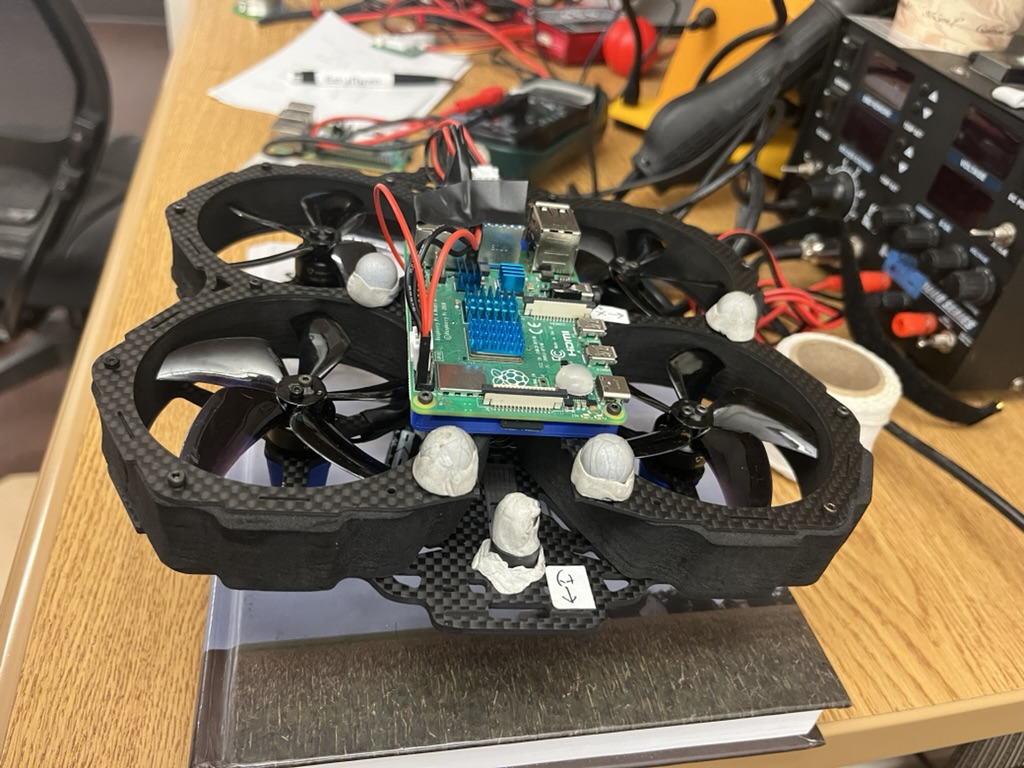
🚁 Quadcopter Testbed
Over the 2024 summer, my lab and I built a quadcopter hardware testbed to implement control algorithms on. This involved uploading and setting up the autopilot PX4 software and setting up and using a ROS environment. I learned so much about hardware implementation and ROS with this project.
🥉 3rd Place at Annual UW Aero & Astro research showcase
I was awarded 3rd place at the annual UW Aero & Astro research showcase for my work on consensus algorithms over Riemannian manifolds. More info